El robot sumo es un deporte que consiste en que dos robots dentro de una plataforma llamada “Dohyo” se empujan entre sí hasta sacar al oponente.
El cuerpo del robot se recomienda diseñarlo e imprimirlo en
3D, por su facilidad relativa de acceso y personalización.
En la presente sección podrá descargar las instrucciones de armado y el chasis
protector de un robot sumo realizado con Arduino, este ejemplo consta de un
ensamble de dos piezas, superior e inferior.
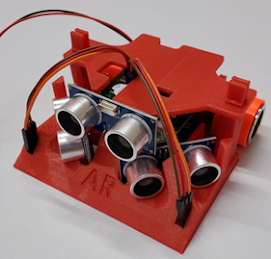
Vista frontal chasis
de robot sumo

Vista posterior chasis
robot sumo
Instrucciones de armado
Impresión del Modelo en 3D
Paso 1.1
Descargue el modelo en 3d en los siguientes 2 enlaces:
1) Chasis
2) Tapa
Paso 1.2
Para ver el modelo digital del robot sumo puede subir los archivos descargados del "Chasis" y "Tapa" en la siguiente página web:
El modelo en 3D podrá ser visto como se presenta en las siguientes imágenes:
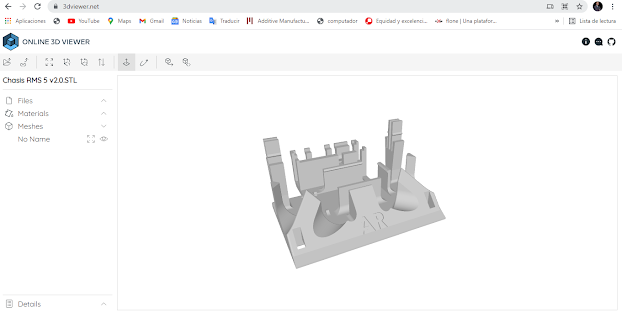

Vista tapa en 3D
Paso 1.3
- Temperatura de impresión: 200 ºC.
- Temperatura de la cama de impresión: 60 ºC.
- Velocidad: 50 mm/s.
- Altura de la capa: 0,12 mm.
- Retracción: 6 mm a 25 mm/s.
- Relleno: 20 %
- Velocidad de capa inicial: 20 mm/s.
- Velocidad inicial del ventilador: 0 %
Armado del robot





Paso 4







Paso 7















Paso 16





Paso 21

Paso 22






Calibración y Pruebas
Tutorial para cargar un programa en Arduino
Sensores y motores


Buen día donde esta la lectura 2 de las partes de la impresora 3D??
ResponderEliminar